机器学习里除了监督和无监督学习做分类回归,还有强化学习算法用于做决策。
灵感来源于:神经科学和心理学,用外界反馈和暗示加强心理偏向。
Chap1 强化学习原理图
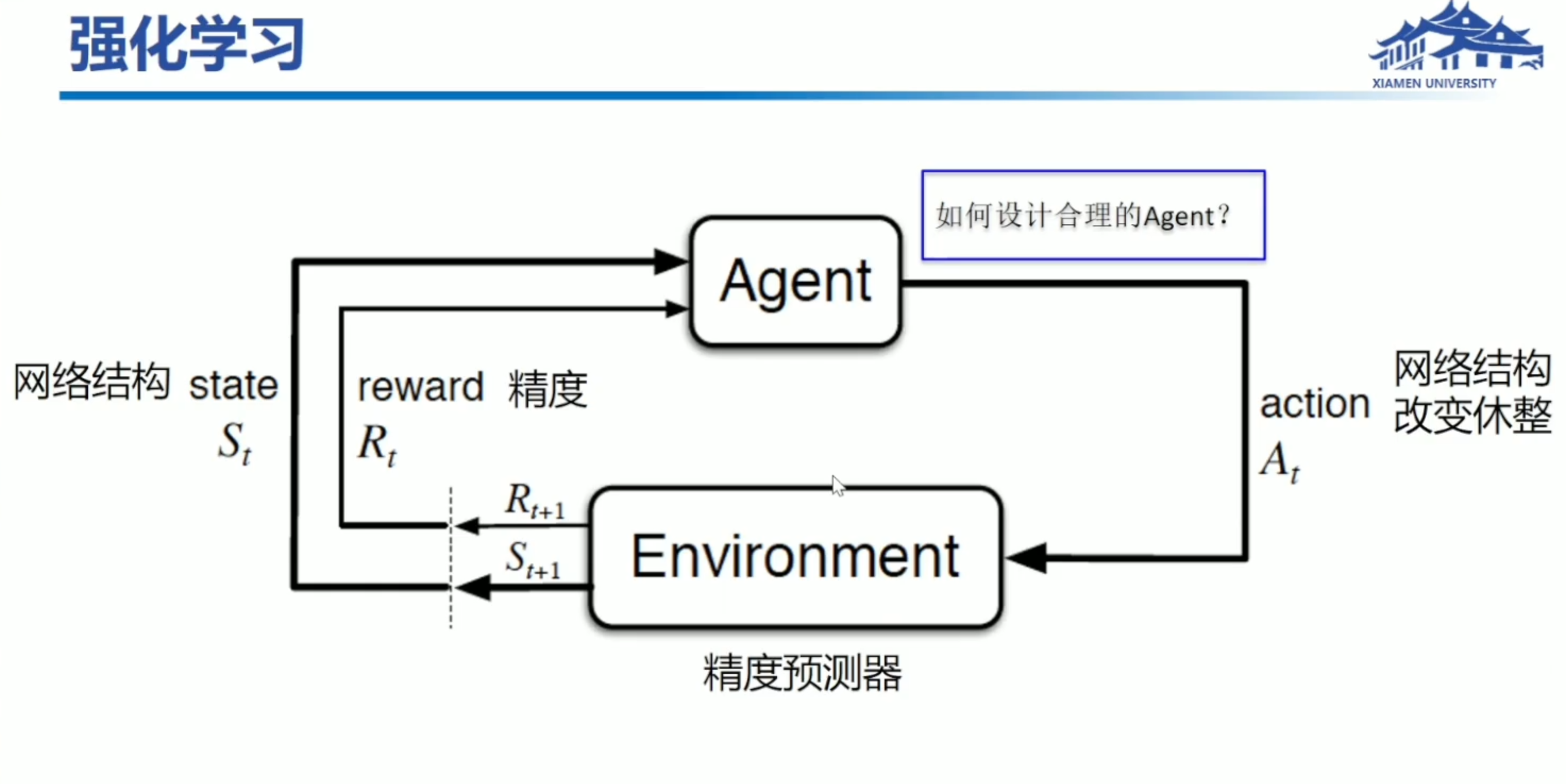
state value,状态值用于评价一个策略好坏。
奖励值的设置
在正数代表奖励的情况下,0不惩罚,也是一种鼓励。
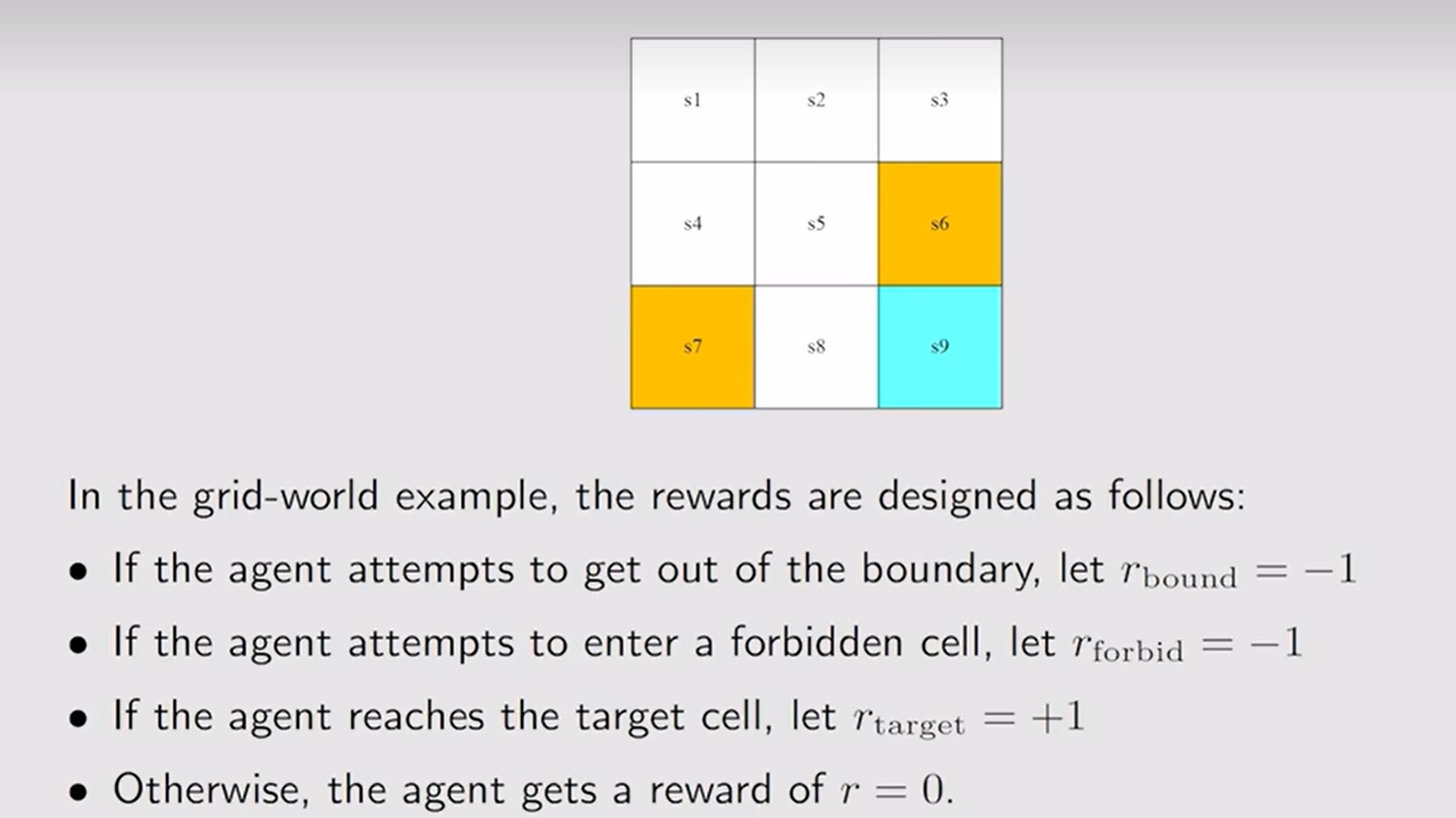
Reward(s,a),奖励考虑当前状态和行为。
Trajectory(轨迹):状态-动作-奖励 链。
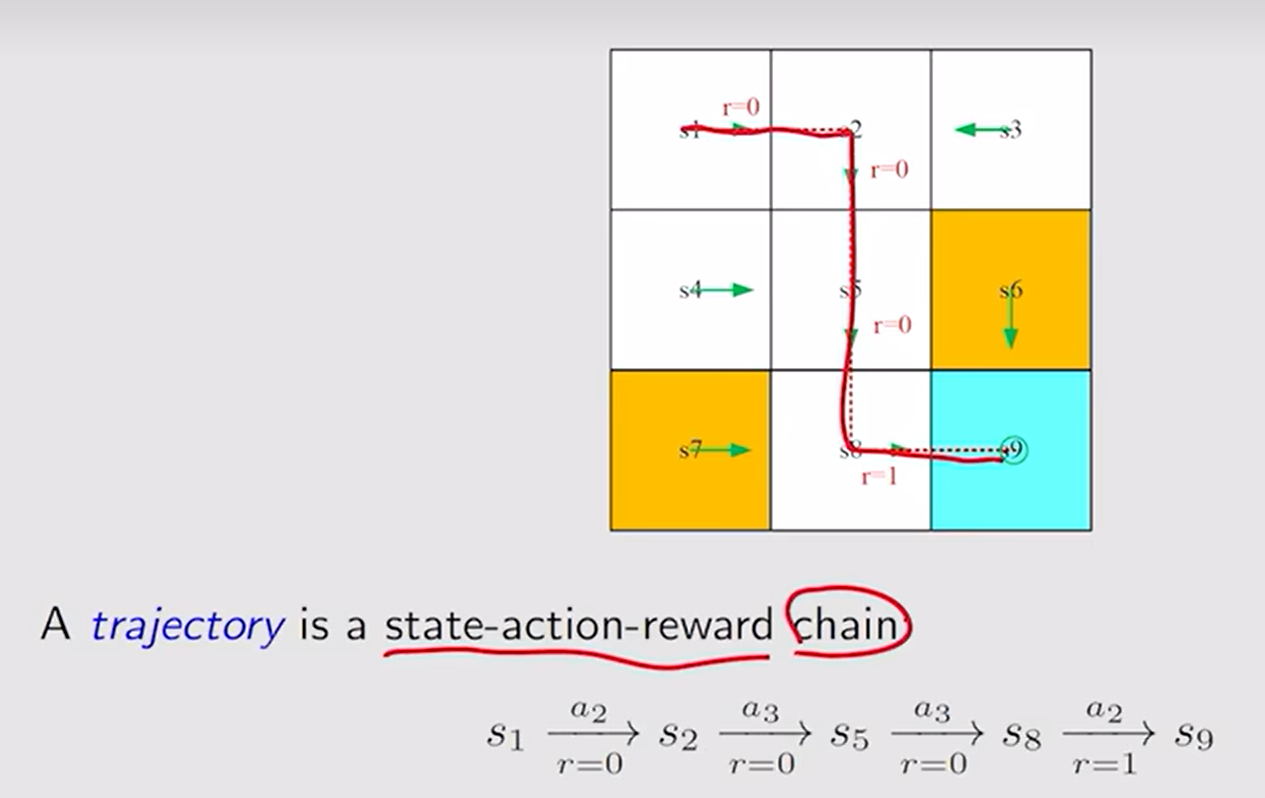
return 是一个轨迹所有的奖励加起来的值。
如return=0+0+0+1=1
而在第9格时所有动作的收益将会一直加一,1+1+1+1+…+1=∞
为避免结果无穷大,引入折扣率,即discount γ∈[0,1],
此时的dicount return=0+γ0+γ^20+γ^3\1+…+γ^n*1=γ^3*1\(1-γ)
γ趋近于0,短视。
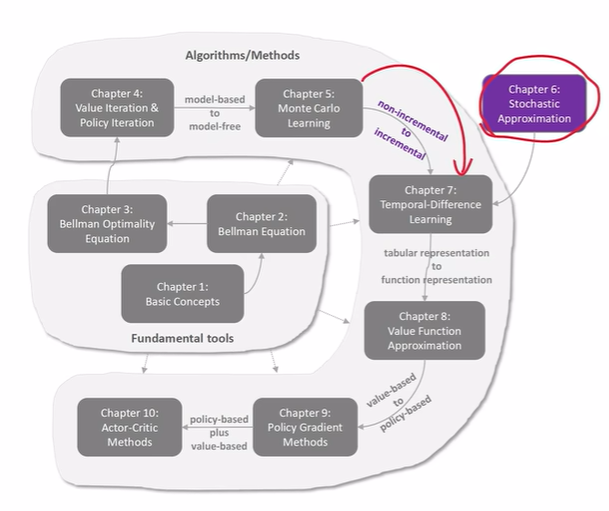
Chap2 贝尔曼方程
Chap3 贝尔曼最优公式
找最优策略,即能够找到的最大状态值对应的策略。
不动点原理=>{最优的策略存在(不一定唯一) ,最优的状态值唯一}
Chap4 优化策略
值更新->策略更新->值更新->…,互相促进,最终得到最优策略和最佳状态值。
值迭代
策略迭代
截断策略迭代
Chap5 Monte Carlo学习
蒙特卡罗
Chap6 随机近似
增量:来一次采样,就可以用它更新估计。
Robbins-Monro算法
SGD
SGD、BGD、MBGD
Chap7 时序差分方法
TD(Temporal Difference)学习状态值
Sarsa:用TD的思想学习action value
Q-learing:直接计算优化的action values;off-policy算法
on-policy :Behavior Policy(生成经验数据)和Target Policy目标策略相同
off-policy:两个策略可以不同
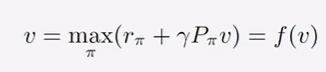
Chap8 Value Function Approximation
引入函数,让神经网络有机会进入到强化学习。
找一个状态值的近似函数v_hat(S,w)
DQN:两个网络、经验回放
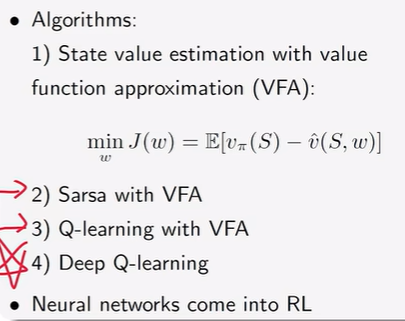
Chap9 策略梯度学习
Policy Gradient是一种On-policy的算法
Chap10 Actor-Critic
Policy Gradient的一种方法,只是critic部分强调了值的作用。

4)从随机的动作选择策略转到确定性的,就是DPG。
3)通过重要性采样可以把on-policy策略变为off-policy策略。