stacking&blending
机器学习比赛大杀器 —— 模型融合,目前只看到排名平均部分。
1.可以集成提交文件(对预测结果的文件进行集成)
2.投票集成(预测结果为类别时) 少数服从多数, 概率意义上相加值大于原来的准确率。
3.集成低相关度的模型(即使其性能较差)也可以提升模型的性能。
4.加权投票
原理理解:三个臭皮匠才可以稍微的对诸葛亮的看法做点改进。
通常我们希望模型越好,其权重就越高。比如,我们将表现最好的模型的投票看作3票,其它的4个模型只看作1票。
原因是:当表现较差的模型需要否决表现最好的模型时,唯一的办法是它们集体同意另一种选择。我们期望这样的集成能够对表现最好的模型进行一些修正,带来一些小的提高。

5.Average
更愿意叫做”bagging Sumissions”。打包提交。
脚本:https://github.com/MLWave/Kaggle-Ensemble-Guide/tree/master/src
平均预测常常会降低过拟合
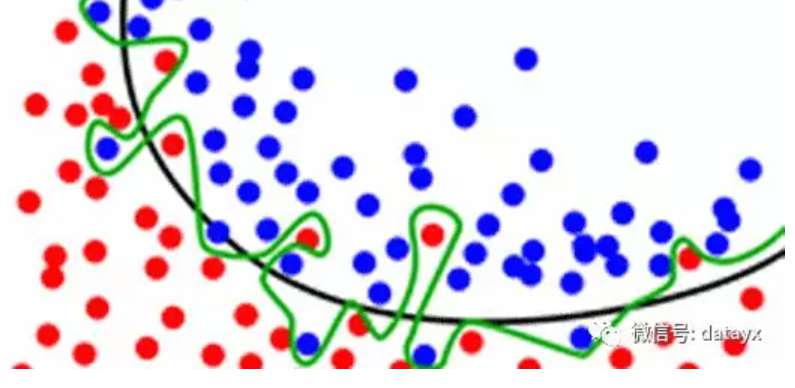
图中黑线比绿线有更好的分割,绿色线已经从数据点中学习了一些噪声。
平均多个不同的绿线, 使其更接近黑线。
我们的目标不仅是去记住这些训练数据(这里有比在随机森林里更加有效的方法来存储数据),而且还要去对我们没有看到的数据进行良好的泛化。
https://zh.wikipedia.org/wiki/ROC%E6%9B%B2%E7%BA%BF
ROC空间
Receiver operating characteristic接收者操作特征
ROC空间将伪阳性率(FPR)定义为 X 轴,真阳性率(TPR)定义为 Y 轴。
- 伪阳性率(FPR, false positive rate)
又称:错误命中率,假警报率 (false alarm rate)
FPR = FP / N = FP / (FP + TN)
- 真阳性率 (TPR, true positive rate)
又称:命中率 (hit rate)、敏感度(sensitivity)
TPR = TP / P = TP / (TP+FN)
则(0,1)是完美情况,FP错误的肯定为0,FN错误的否定为0.


离左上角越近,即x越小、y越大,模型预测准确度越好;
三种模型中,A>B>C但是只要把C当作一个相反结果预测机,则C’>A>B;
ROC曲线
调整二分类模型的阈值,得出不同的FPR和TPR,将这些点全部作在一个ROC空间里,就成为特定模型的ROC曲线。
- 在同一个分类器之内,当阈值设置为最高时,没有样本被预测为阳性,FPR=0,TPR=0;得出ROC坐标系左下角的点 (0, 0)。
- 当阈值设置为最低时,所有样本均为阳性,FPR=FP/N=FP/(TN+FP)=1;TPR=TP/(TP+FN)=1;得出ROC坐标系右上角的点 (1, 1)。
- 随着阈值调低,FP、TP增大,FN、TN减小;ROC点 往右上(或右/或上)移动,或不动;但绝不会往左下(或左/或下)移动。
AUC曲线下面积
Area Under the Curve of ROC,作为评价模型优劣的指针;取值范围为[0,1]
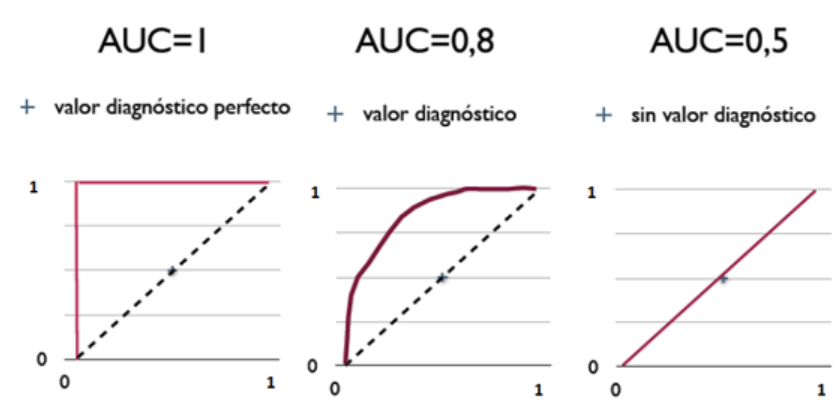
AUC值越大的分类器,正确率越高。
从AUC判断分类器(预测模型)优劣的标准:
- AUC = 1,是完美分类器,采用这个预测模型时,存在至少一个阈值能得出完美预测。绝大多数预测的场合,不存在完美分类器。
- 0.5 < AUC < 1,优于随机猜测。这个分类器(模型)妥善设置阈值的话,能有预测价值。
- AUC = 0.5,跟随机猜测一样(例:丢铜板),模型没有预测价值。
- AUC < 0.5,比随机猜测还差;但只要总是反预测而行,就优于随机猜测。